
Как сделать частотный преобразователь своими руками?
Частотный преобразователь своими руками
Частотный преобразователь своими руками

Частотный преобразователь своими руками — представляю вам небольшую статью о асинхронном двигателе и частотном преобразователе, который мне ранее приходилось делать. Вот и теперь потребовался хороший привод для циркулярной пилы. Конечно можно было бы взять в магазине фирменный частотник, но все-таки вариант самостоятельного изготовления оказался для меня наиболее приемлемым.
К тому же, качество регулировки скорости привода пилорамы не требовало абсолютной точности. Однако с нагрузками ударного типа и длительными перегрузками он должен справляться. К тому же хотелось сделать управление наиболее простым, без всяких там параметров, а просто установить пару кнопок.
Главные преимущества привода с регулировкой частоты:
- Создаем из однофазного напряжения 220v полновесные три фазы 220v, сдвиг у которых будет 120°, при этом получаем абсолютный вращательный момент с мощностью на валу
- Повышенный момент старта с плавным запуском без максимального пускового тока
- Нет сильного замагничивания и излишнего перегрева мотора, как это бывает когда применяются конденсаторы
- При необходимости можно свободно управлять скоростью вращения и менять направление
Ниже показана принципиальная схема устройства:

Трехфазный мост выполнен на гибридных IGBT транзисторах c диодами обратной проводимости. В целом это представляет собой бустрепное управление микроконтроллером PIC16F628A, осуществляемое с помощью специализированных оптодрайверов HCPL-3120. Во входном тракте установлен конденсатор гашения напряжения, выполняющего функцию мягкой зарядки электролитических конденсаторов в цепи постоянного напряжения.
Быстродействующая защита
Далее по схеме он зашунтирован электромагнитным реле, при этом на PIC16F628A подается цифровой логический уровень готовности. В схеме предусмотрена быстродействующая защита по току от короткого замыкания и критической перегрузке мотора, выполненная по триггерной схеме. Все это управляется при помощи двух кнопок и одного переключателя, который изменяет направление вращения вала.
Частотный преобразователь своими руками, в частности участок силовых напряжений был собран методом навесного монтажа, а контроллер размещен на печатной плате, которая показана ниже:

Постоянные резисторы с номиналом 270к, шунтирующие конденсаторы установленные в цепи затвора IGBT, запаял со стороны дорожек, так как упустил из виду сделать для них площадки. Их конечно можно заменить на smd.
Здесь показано фото печатной платы контроллера после распайки компонентов:

А это с противоположной стороны

Для подачи напряжения питания в модуль управления был изготовлен стандартный обратноходовой импульсный источник питания.
Принципиальная схема блока питания:

Чтобы изготовить частотный преобразователь своими руками в принципе можно использовать практически любой источник питания с выходным напряжением 24v. Однако, этот блок питания должен быть стабилизированный и с задержкой напряжения на выходе с момента исчезновения напряжения сети, хотябы в пределах 3-х секунд. Это обусловлено тем, что двигатель смог отключится в случае возникновения ошибки по DC. Достигается подбором электролитического конденсатора С1 с большим значением емкости.
Ну, а теперь нужно подробнее разобраться в самом важном компоненте данного устройства — в программе микроконтроллера. В интернете подходящей для меня информации по этому вопросу я не нашел, хотя были предложения установить специальные фирменные контроллеры. Но как я уже говорил, мне принципиально нужно было установить, что-то собственной разработки. Приступил во всех подробностях анализировать ШИМ модуляцию, в какое время и каким способом открыть определенный транзистор…
Программа формирования задержек
Выяснились некоторые закономерности и получился образец несложной программы формирования задержек. При ее использовании получается произвести достаточно хорошую синусоидальную ШИМ с возможностью изменять напряжение. Естественно контроллер делать какие либо вычисления не успевал, задержки не давали того эффекта, который был нужен. Следовательно, такой вариант обсчитывания ШИМ на микроконтроллере PIC16F628A я забраковал сразу.
В результате образовалась констант матрица, а ее уже отрабатывал PIC16F628A. Они формировали и диапазон частоты и напряжение питания. Конечно эта работа по созданию данного устройства несколько затянулась. Циркуляркой уже полным ходом пилили на конденсаторах, когда появился необходимый вариант прошивки. Первоначально тестировал схему на моторе от вентилятора, мощностью 180 Вт. Вот фото прибора на стадии экспериментальных работ:

Тестирование устройства
Чуть позже, в процессе испытания программа подвергалась усовершенствованию, а после запуска двигателя мощностью на 4 кВт я практически был удовлетворен итогом своей работы. Защита от короткого замыкания прекрасно срабатывает, полутора-киловаттный мотор на 1440об/мин с диском 300мм свободно справлялся с приличными брусками. Шкивы были установлены одинаковые, что на двигатель, что на вал циркулярки. При попадании пилы на сучок сетевое напряжение немного падало, хотя двигатель продолжал работать.
По ходу работы потребовалось немного натянуть ремень, поскольку при увеличении нагрузки он начинал скользить на шкиве. В дальнейшем применили двойную передачу. Но на этом решил не останавливаться, поэтому сейчас начал усовершенствовать программу, в итоге она будет значительно эффективней. Принцип работы ШИМ-контролера немного усложняется, появится больше режимов, появится ресурс раскручивания выше номинального значения.
В конце статьи файлы для того самого простого варианта устройства, которое прекрасно работает с циркулярной пилой уже больше года.
Характеристики:
- Частота на выходе: 2,5-50Гц, шаг 1,25Гц; Частота ШИМ-контроллера синхронная, с возможностью изменения. Диапазон частот в пределах 1750-3350Гц.; Скалярное управление частотным преобразователем, мощность мотора около 4кВт. Самая меньшая частота работы при разовом нажатии кнопки «Пуск» — составляет 10Гц.
- Во время удержании кнопки нажатой появляется разгоняющий момент, а когда кнопка отпускается, то частота буде той, до какой смог разогнаться. Частота по максимуму — 50Гц информирует светодиодный индикатор. Номинальное время разгоняющего момента составляет 2 секунды.
- Индикатор «Готов» сообщает о готовности устройства к старту двигателя.
Частотный привод 5-200 Гц (10-400 Гц)
В данной статье речь пойдет о частотном преобразователе, в простонародье, частотнике. Данный частотник, а в дальнейшем частотный привод, способен управлять 3-х фазным асинхронным двигателем. В данном частотном приводе (ЧП) я использую интеллектуальный силовой модуль компании International Rectifier, а конкретно IRAMS10UP60B (на AliExpress), единственное, что с ним сделал, это перегнул ножки, так что, по сути, модуль получился IRAMS10UP60B-2. Выбор на данный модуль пал преимущественно из-за встроенного драйвера. Главной особенностью встроенного драйвера является возможность использования 3 ШИМ вместо 6 ШИМ каналов. Кроме того цена на данный модуль на eBay около 270 рублей. В качестве управляющего контроллера использую ATmega48.
Разрабатывая данный привод я делал упор на эффективность конструкции, минимальную себестоимость, наличие необходимых защит, гибкость конструкции. В результате получился частотный привод со следующими характеристиками (функциями):
- Выходная частота 5-200 Гц
- Скорость набора частоты 5-50 Гц в секунду
- Скорость снижения частоты 5-50 Гц в секунду
- 4-х фиксированная скорость (каждая из которых от 5-200 Гц)
- Вольт добавка 0-20%
- Две «заводских» настройки, которые всегда можно активировать
- Функция намагничивания двигателя
- Функция полной остановки двигателя
- Вход для реверса (как без него)
- Возможность менять характеристику U/F
- Возможность задания частоты с помощью переменного резистора
- Контроль температуры IGBT модуля (сигнализация в случае перегрева и остановки привода)
- Контроль напряжения DC звена (повышенное-пониженное напряжение DC звена, сигнализация и остановка привода)
- Пред заряд DC звена
- Максимальная мощность с данным модулем 750 вт, но крутит и 1.1 кв на моем ЧПУ
- Все это на одной плате размером 8 х 13 см .
На данный момент защита от сверх тока или кз не реализованы (считаю нет смысла, хотя, свободную ногу в МК с прерыванием по изменению оставил)
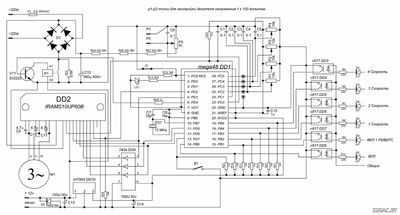
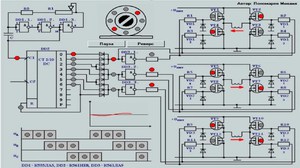
Собственно, схема данного девайса :
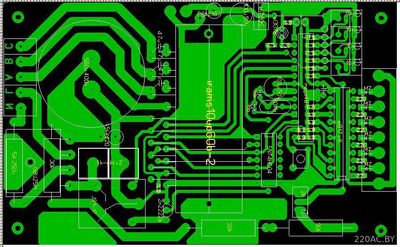
Проект в layout
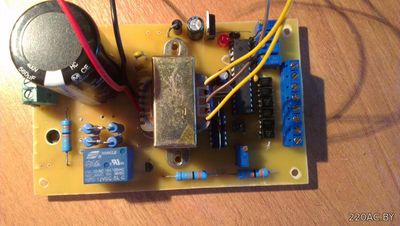
Ниже фото того, что у меня получилось
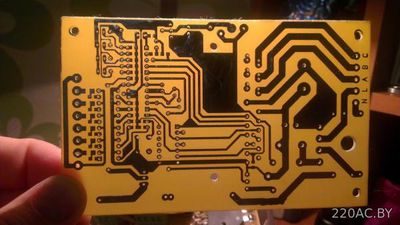
Печатная плата данного девайса (доступна в lay под утюг)

На данном фото полностью рабочий экземпляр, проверенный и обкатанный (не имеет панельки расположен слева). Второй для теста atmega 48 перед отправкой (расположен справа).
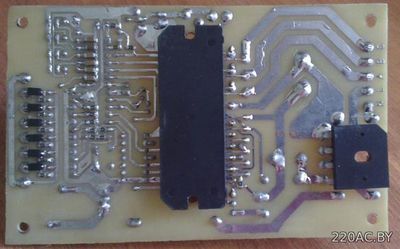
На данном фото тот самый irams (делал с запасом, должен поместится iramx16up60b )
Алгоритм работы устройства
Изначально МК (микроконтроллер) является настроенным на работу с электродвигателем номинальным напряжением 220 В при частоте вращающего поля 50Гц (т.е. обычный асинхронник, на котором написано 220 в 50 Гц). Скорость набора частоты установлена на уровне 15 Гц/сек.(т.е. разгон до 50 гц займет чуть более 3 сек., до 150 Гц-10 сек ). Вольт добавка установлена на уровне 10 %, длительность намагничивания 1 сек. (постоянная величина неизменна ), длительность торможения постоянным током 1 сек. (постоянная величина неизменна). Следует отметить ,что напряжение при намагничивании, как и при торможении, является напряжением вольт добавки и меняется одновременно. К слову, преобразователь частоты является скалярным, т.е. с ростом выходной частоты увеличивается выходное напряжение.
После подачи питания происходит заряд емкости dc звена. Как только напряжение достигает 220В (постоянное ) с определенной задержкой включается реле предзаряда и загорается единственный у меня светодиод L1. С этого момента привод готов к запуску. Для управления частотником имеется 6 входов:
- Вкл (если подать лишь этот вход, ЧП будет вращать двигатель с частотой 5 Гц)
- Вкл+реверс(если подать лишь этот вход, ЧП будет вращать двигатель с частотой 5 Гц, но в другую сторону)
- 1 фиксированная частота (задается R1)
- 2 фиксированная частота (задается R2)
- 3 фиксированная частота (задается R3)
- 4 фиксированная частота (задается R4)
В этом управлении есть одно Но. Если в процессе вращения двигателя менять задание на резисторе, то оно изменится лишь после повторной подачи команды (вкл.) или (вкл+реверс.). Иначе говоря, данные с резисторов читаются пока отсутствуют эти два сигнала. Если планируется регулировать скорость с помощью резистора в процессе работы, то необходимо установить джампер J1.В этом режиме активен лишь первый резистор, причем резистор R4 ограничивает максимальную частоту, то есть если его выставить на 50% (2.5 вольта 4 «штырь». на фото ниже 5 земля), то частота R1 будет регулироваться резистором от 5 до 100 Гц.
Для задании частоты вращение нужно учитывать, что 5v на входе в МК соответствует 200 Гц., 1v-40 Гц, 1.25v-50 Гц и т.д. Для измерения напряжение предусмотрены контакты 1-5, где 1-4 соответствуют номерам резисторов, 5- общий минус(на фото ниже). Резистор R5 служит для подстройки масштабирования напряжения DC звена 1 в -100 в (на схеме R30).

Внимание! Плата находится под напряжением опасным для жизни. Входа управления развязаны оптопарами.
Особенности настройки
Настройка привода перед первым включением сводится к проверке монтажа электронных компонентов и настройки делителя напряжения для DC звена (R2).
100 Вольтам DC звена должно соответствовать 1 вольт на 23 (ножке МК)- это ВАЖНО. На этом настройка завершена.
Перед подачей сетевого напряжения необходимо промыть плату (удалить остатки канифоли) со стороны пайки растворителем или спиртом, желательно покрыть лаком.
Привод имеет «заводские » настройки, которые подходят как для двигателя с напряжением 220 В и частотой 50 Гц), так и для двигателя с напряжением 380 в и частотой 50 гц. Данные настройки всегда можно установить если вы не решаетесь сами настраивать привод. Для того чтобы установить «заводские » настройки для двигателя (220 в 50 Гц) :
- Включить привод
- Дождаться готовности (если подано питание только на МК , просто подождать 2-3 секунды)
- Нажать и удерживать кнопку В1 до тех пор, пока светодиод L1 не начнет мигать, отпустить кнопку В1
- Подать команду выбора 1 скорости. Как только светодиод перестанет мигать, убрать команду
- Привод настроен . В зависимости от того . светодиод горел (если не горел, то привод ожидает напряжения на DC звене).
При такой настройке автоматически в записываются следующие параметры:
- Номинальная частота двигателя при 220 В — 50 Гц
- Вольт добавка (напряжение намагничивания, торможения ) — 10%
- Интенсивность разгона 15 Гц./сек
- Интенсивность торможения 15 Гц./сек
Если подать сигнал выбора второй скорости, то в EEPROM запишутся следующие параметры (разница лишь в частоте):
- Номинальная частота двигателя при 220 В- 30 Гц
- Вольт добавка (Напряжение намагничивания, торможения ) 10%
- Интенсивность разгона 15 Гц./сек
- Интенсивность торможения 15 Гц./сек
Наконец, третий вариант Настройки:
- Нажать на кнопку В1 и держать
- Дождаться, когда светодиод начнет мигать
- Отпустить кнопку В1
- Не подавать напряжение на входа выбора 1-ой или 2-ой скорости
- Задать параметры подстроечными резисторами
- Нажать и удерживать кнопку В1 до тех пор, пока светодиод не начнет моргать
Таким образом, до тех пор, пока светодиод мигает, привод находится в режиме настройки. В этом режиме при подаче входа 1-ой или 2-ой скорости в EEPROM записываются параметры. Если не подавать напряжение на входа выбора 1-ой или 2-ой скорости, то фиксированные параметры в EEPROM не запишутся, а будут задаваться подстроечными резисторами.
- Резистор задает номинальную частоту двигателя при 220 В ( Так, например, если на двигателе написано 200 Гц /220 то резистор нужно выкрутить на максимум; если написано 100 Гц/ 220 в нужно добиться 2.5 Вольта на 1-ом контакте. (1 Вольт на первом контакте соответствует 40 Гц); если на двигателе написано 50 Гц/400 В то нужно выставить 27 Гц/0,68 В (например:(50/400)*220=27 Гц )так, как нам необходимо знать частоту двигателя при 220В питания двигателя. Диапазон изменения параметра 25 Гц — 200 Гц.(1 Вольту на контакте 1-ом соответствует 40 Гц)
- Резистор отвечает за вольт добавку. 1 Вольт на 2-ом контакте соответствует 4% напряжения вольт добавки (мое мнение выбрать на уровне 10% то есть 2.5 вольта повышать с осторожностью) Диапазон настройки 0-20% от напряжения сети (1 Вольту на контакте 2-ом соответствует 4%)
- Интенсивность разгона 1 В соответствует 10 Гц/сек (на мой взгляд оптимально 15 -25 Гц/сек) Диапазон настройки 5 Гц/сек — 50 Гц/сек. (1 вольту на контакте 3-ом соответствует 10 Гц/сек)
- Интенсивность торможения 1 В соответствует 10 Гц/сек (на мой взгляд оптимально 10 -15 Гц/сек) Диапазон настройки 5 Гц/сек — 50 Гц/сек. (1 вольту на контакте 4-ом соответствует 10 Гц/сек)
После того, как все резисторы выставлены нажимаем и держим кнопку В1 до тех пор пока светодиод не перестанет мигать. Если светодиод моргал и загорелся, то привод готов к запуску.Если светодиод моргал и НЕ загорелся, то ждем 5 секунд, и только потом отключаем питание от контроллера.
Ниже представлена вольт-частотная характеристика устройства для двигателя 220 в 50 Гц с вольт добавкой в 10 % .
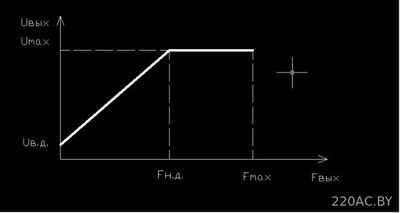
- Uмах- максимальное напряжение, которое способен выдать преобразователь
- Uв.д.- напряжение вольт добавки в процентах от напряжении сети
- Fн.д.- номинальная частота вращения двигателя при 220 В . ВАЖНО
- Fmax- максимальная выходная частота преобразователя.
Еще один пример настройки
Предположим, у вас имеется двигатель, на котором указана номинальная частота 50 Гц , номинальное напряжение 80 В, Чтобы узнать какая будет номинальная частота при 220 В необходимо: 220 В разделить на номинальное напряжение и умножить на номинальную частоту (220/80*50=137 Гц). Таким образом, мы получим,что напряжение на 1 контакте (резисторе) нужно выставить 137/40=3,45 В.
Симуляция в протеусе разгон 0-50 Гц одной фазы (на 3-х фазах зависает комп )
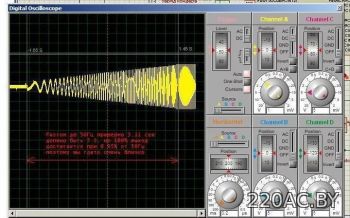
Как видно из скриншота с ростом частоты увеличивается амплитуда синуса. Разгон занимает примерно 3.1 сек.
По поводу питания
Рекомендую использовать трансформатор, так как это самый надежный вариант. На моих тестовых платах нет диодных мостов и стабилизатора для igbt модуля 7812. Для скачивания доступны две печатные платы. Первая та которая представлена в обзоре. Вторая имеет незначительные изменения, добавлен диодный мостик и стабилизатор. Защитный диод ставить обязательно P6KE18A или 1.5KE18A ставить обязательно.
Пример размещения трансформатора, как оказалось найти совсем нетрудно.
Какой двигатель можно подключить к данному преобразователю частоты?
Все зависит от модуля. В принципе можно подключить любой, главное, чтобы его сопротивление для модуля irams10up60 было более 9 Ом. Нужно учесть, что модуль irams10up60 рассчитан на маленький импульсный ток и имеет встроенную защиту на уровне 15 А Этого очень мало. Но для двигателей 50 Гц 220 В 750 Вт, этого за глаза. Если у вас высокооборотистый шпиндель, то скорее всего он имеет маленькое сопротивление обмоток. Данный модуль может пробьет импульсным током. При использовании модуля IRAMX16UP60B (ножки придется загнуть самостоятельно) мощность двигателя по даташиту возрастает с 0.75 до 2.2 кВт.
Главное у данного модуля: ток короткого замыкания 140 А против 47 А, защита настроена на уровне 25 А. Какой модуль использовать решать вам. Нужно помнить что на 1 кВт необходимо 1000 мкФ емкости dc звена.
По поводу защиты от КЗ. Если у привода сразу после выхода не ставить сглаживающий дроссель (ограничивает скорость нарастания тока) и коротнуть выход модуля, то модулю придет «хана». Если у вас модуль iramX, шансы есть. А вот с IRAMS шансов ноль, проверено.
Программа занимает 4096 кБ памяти из 4098. Все сжато и оптимизировано под размер программы по максимум. Время цикла есть фиксированная величина равная 10 мс.
На данный момент всё вышеописанное работает и испытано.
Если использовать кварц на 20 МГц, то привод получится 10-400 Гц; темп разгона 10-100 Гц/сек; частота ШИМа возрастет до 10кГц; время цикла упадет до 5мс.
Забегая вперед следующий частотный преобразователь будет реализован на ATmegа64, иметь разрядность ШИМ не 8, а 10 Бит, иметь дисплей и множество параметров.
Ниже смотрите видео настройки привода, проверки защиты перегрева, демонстрации работы (использую двигатель 380 В 50 Гц, а настройки для 220 В 50 Гц). Так сделал специально, чтобы проверить как работает ШИМ с минимальным заданием.)
Как сделать частотный преобразователь своими руками?
Автор: DC-AC, k-d-n-electronics@yandex.ru
Опубликовано 29.07.2014
Создано при помощи КотоРед.
Всем здравствуйте. Вот решил написать статейку про асинхронный привод и преобразователь частоты, который я изготавливал. Моему товарищу надо было крутить пилораму, и крутить хорошо. А сам я занимался импульсной электроникой и сразу предложил ему частотник. Да, можно было купить фирмовый преобразователь, и мне приходилось с ними сталкиваться, параметрировать, но захотелось своего, САМОДЕЛАШНОГО! Да и привод циркулярки к качеству регулирования скорости не критичен, только вот к ударным нагрузкам и к работе в перегрузе должен быть готов. Также максимально-простое управление с помощью пары кнопок и никаких там параметров.
Основные достоинства частотнорегулируемого привода (может для кого-то повторюсь):
Формируем из одной фазы 220В полноценные 3 фазы 220В со сдвигом 120 град., и имеем полный вращающий момент и мощность на валу.
Увеличенный пусковой момент и плавный пуск без большого пускового тока
Отсутствует замагничивание и лишний нагрев двигателя, как при использовании конденсаторов.
Возможность легко регулировать скорость и направление, если необходимо.
Вот какая схемка собралась:
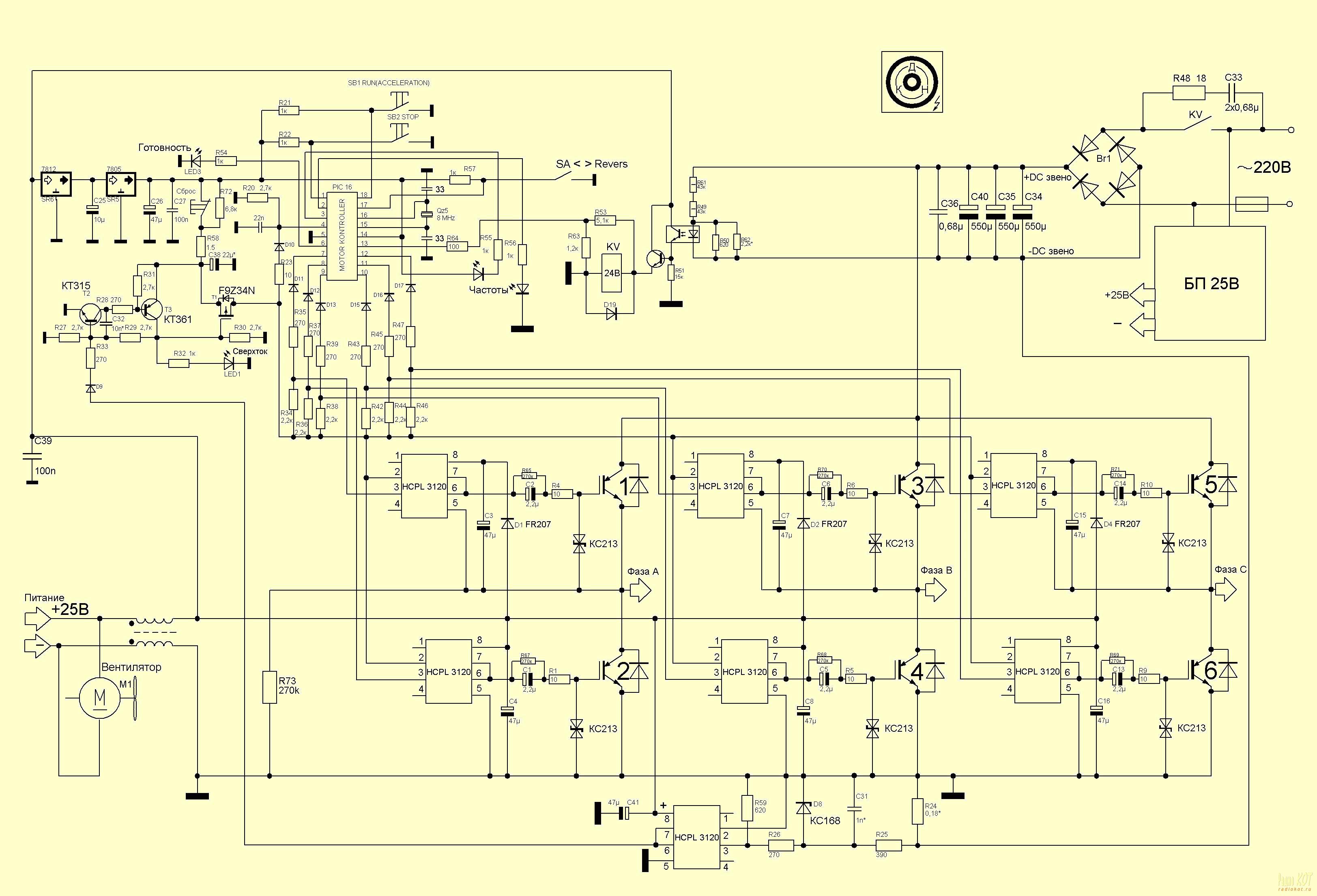
3-фазный мост на IGBT транзисторах c обратными диодами (использовал имеющиеся G4PH50UD) управляется через оптодрайвера HCPL 3120 (бутстрепная схема запитки) микроконтроллером PIC16F628A. На входе гасящий конденсатор для плавного заряда электролитов DC звена. Затем его шунтирует реле и на микроконтроллер одновременно приходит логический уровень готовности. Также имеется триггер токовой защиты от к.з. и сильной перегрузки двигателя. Управление осуществляют 2 кнопки и тумблер изменения направления вращения.
Силовая часть мною была собрана навесным монтажом. Плата контроллера отутюжина вот в таком виде:
Параллельные резисторы по 270к на проходных затворных конденсаторах (забыл под них места нарисовать) припаял сзади платы, потом хотел заменить на смд но так и оставил.
Есть внешний вид этой платы, когда уже спаивал:

С другой стороны

Для питания управления был собран типовой импульсный обратноходовой (FLAYBACK) блок питания.

Можно использовать любой блок питания на 24В, но стабилизированный и с запаздыванием пропадания выходного напряжения от момента пропажи сетевого на пару тройку секунд. Это необходимо чтобы привод успел отключиться по ошибке DC. Добивался установкой электролита С1 большей ёмкости.
Теперь о самом главном. о програме микроконтроллера. Программирование простых моргалок для меня сложности не представляло, но тут надо было поднатужить мозги. Порыскав в нете, я не нашёл на то время подходящей информации. Мне предлагали поставить и специализированные контроллеры, например контроллер фирмы MOTOROLA MC3PHAC. Но хотелось, повторюсь, своего. Принялся детально разбираться с ШИМ модуляцией, как и когда нужно открыть какой транзистор. Открылись некие закономерности и вышел шаблон самой простой программы отработки задержек, с помощью которой можно выдать удовлетворительно синусовую ШИМ и регулировать напряжение. Считать ничего контроллер конечно не успевал, прерывания не давали что надо и поэтому я идею крутого обсчёта ШИМ на PIC16F628A сразу отбросил. В итоге получилась матрица констант, которую отрабатывал контроллер. Они задавали и частоту и напряжение. Возился честно скажу, долго. Пилорама уже во всю пилила конденсаторами, когда вышла первая версия прошивки. Проверял всю схему сначала на 180 ватном движке вентиляторе. Вот как выглядела «экспериментальная установка»:
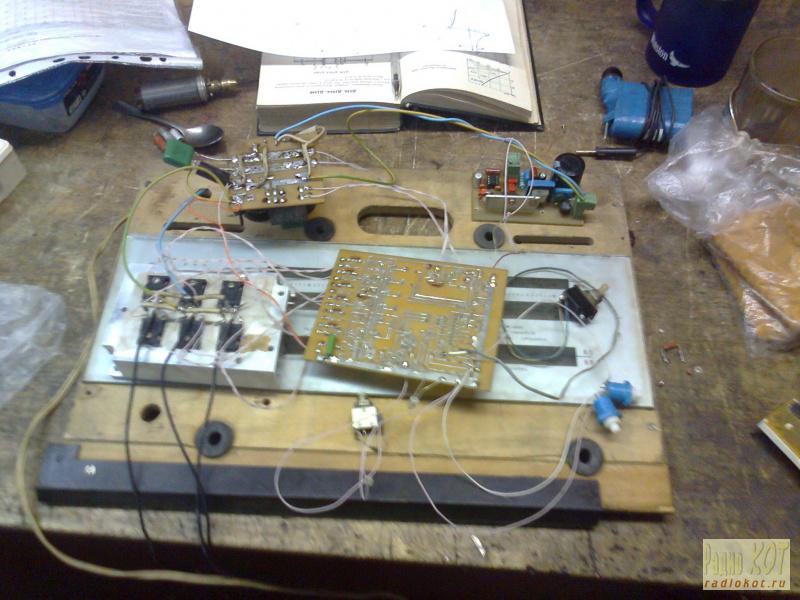
Первые эксперименты показали, что у этого проекта точно есть будущее.
Программа дорабатывалась и в итоге после раскрутки 4кВТ-ного движка её можно было собирать и идти на лесопилку.
Товарищ был приятно удивлён, хоть и с самого начала относился скептически. Я тоже был удивлён, т.к. проверилась защита от к.з. (случайно произошло в борно двигателя). Всё осталось живо. Двигатель на 1,5кВт 1440об/мин легко грыз брусы диском на 300мм. Шкивы один к одному. При ударах и сучках свет слегка пригасал, но двигатель не останавливался. Ещё пришлось сильно подтягивать ремень, т.к. скользил при сильной нагрузке. Потом поставили двойную передачу.
Сейчас ещё дорабатываю программу она станет еще лучше, алгоритм работы шим чуть сложнее, режимов больше, возможность раскручиваться выше номинала. а тут снизу та самая простая версия которая работает на пиле уже около года.
Выходная Частота: 2,5-50Гц, шаг 1,25Гц; Частота ШИМ синхронная, изменяющаяся. Диапазон примерно 1700-3300Гц.; Скалярный режим управления U/F, мощность двигателя до 4кВт.
Минимальная рабочая частота после однократного нажатия на кнопку ПУСК(RUN) — 10Гц.
При удержании кнопки RUN происходит разгон, при отпускании частота остаётся та, до которой успел разогнаться. Максимальная 50Гц- сигнализируется светодиодом. Время разгона около 2с.
Светодиод «готовность» сигнализирует о готовности к запуску привода.
Реверс опрашивается в состоянии готовности.
Режимов торможения и регулирования частоты вниз нет, но они в данном случае и не нужны.
При нажатии Стоп или СБРОС происходит остановка выбегом.
На этом пока всё. Спасибо, кто дочитал до конца.
Частотник для трехфазного электродвигателя своими руками
 Сегодня асинхронные двигатели являются основными тяговыми приводами для станков, конвейеров, и прочих промышленных агрегатов.
Сегодня асинхронные двигатели являются основными тяговыми приводами для станков, конвейеров, и прочих промышленных агрегатов.
Для того чтобы моторы могли нормально функционировать, им нужен частотный преобразователь. Он позволяет оптимизировать работу агрегата и продлить срок его службы. Покупать устройство необязательно — частотник для трехфазного электродвигателя можно сделать своими руками.
- Назначение частотного преобразователя
- Принцип работы устройства
- Самостоятельное изготовление прибора
- Делаем трехфазный преобразователь
- Частотник для однофазного двигателя
- Возможные проблемы при проверке
Назначение частотного преобразователя
 Асинхронный электродвигатель может работать и без частотника, но в этом случае у него будет постоянная скорость без возможности регулировки. К тому же отсутствие частотного преобразователя приведет к возрастанию пускового тока в 5−7 раз от номинального, что вызовет увеличение ударных нагрузок, повысит потери электроэнергии и приведет к существенному сокращению срока службы агрегата.
Асинхронный электродвигатель может работать и без частотника, но в этом случае у него будет постоянная скорость без возможности регулировки. К тому же отсутствие частотного преобразователя приведет к возрастанию пускового тока в 5−7 раз от номинального, что вызовет увеличение ударных нагрузок, повысит потери электроэнергии и приведет к существенному сокращению срока службы агрегата.
Для нивелирования всех вышеперечисленных негативных факторов были изобретены преобразователи частоты для асинхронных двигателей трехфазного и однофазного тока.
Частотник дает возможность в широких пределах регулировать скорость электродвигателя, обеспечивает плавный пуск, позволяет регулировать как скорость запуска, так и скорость торможения, подключать трехфазный мотор к однофазной сети и многое другое. Все эти функции зависят от микроконтроллера, на котором он построен, и могут отличаться у разных моделей.
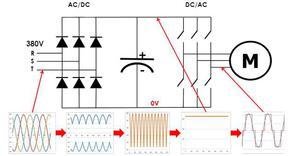
Принцип работы устройства
 Переменный ток поступает из сети на диодный мост, где он выпрямляется и попадает на батарею сглаживающих конденсаторов, где окончательно превращается в постоянный ток, который поступает на стоки мощных IGBT транзисторов, управляемых главным контроллером. Истоки транзисторов, в свою очередь, подключены к двигателю.
Переменный ток поступает из сети на диодный мост, где он выпрямляется и попадает на батарею сглаживающих конденсаторов, где окончательно превращается в постоянный ток, который поступает на стоки мощных IGBT транзисторов, управляемых главным контроллером. Истоки транзисторов, в свою очередь, подключены к двигателю.
Вот упрощенная схема преобразователя частоты для трехфазного асинхронного двигателя.
Теперь рассмотрим, что происходит с транзисторами и как они работают.
Полевой транзистор (он же ключ, мосфет и пр.) — это электронный выключатель, принцип его действия основан на возникновении проводимости между двумя выводами (сток и исток) мосфета, при появлении на управляющем выводе (затворе) напряжения, превышающего напряжение стока.
В отличие от обычных реле, ключи работают на очень высоких частотах (от нескольких герц до сотен килогерц) так что заменить их на реле не получится.
 С помощью этих быстродействующих переключателей микроконтроллер получает возможность управления силовыми цепями.
С помощью этих быстродействующих переключателей микроконтроллер получает возможность управления силовыми цепями.
К контроллеру, кроме мосфетов, также подключены датчики тока, органы управления частотником, и другая периферия.
При работе частотного преобразователя микроконтроллер измеряет потребляемую мощность и, в соответствии с установленными на панели управления параметрами, изменяет длительность и частоту периодов, когда транзистор открыт (включен) или закрыт (выключен), тем самым изменяя или поддерживая скорость вращения электродвигателя.
Самостоятельное изготовление прибора
Несмотря на множество агрегатов заводского производства, люди делают преобразователи частоты самостоятельно, благо на сегодняшний день все его компоненты можно купить в любом радиомагазине или заказать из Китая. Такой частотник обойдется вам значительно дешевле покупного, к тому же вы не будете сомневаться в качестве его сборки и надежности.
Делаем трехфазный преобразователь
 Собирать наш преобразователь будем на мосфетах G4PH50UD, которыми будет управлять контроллер PIC16F628A посредством оптодрайверов HCPL3120.
Собирать наш преобразователь будем на мосфетах G4PH50UD, которыми будет управлять контроллер PIC16F628A посредством оптодрайверов HCPL3120.
Собранный частотник при подключении в однофазную сеть 220 В будет иметь на выходе три полноценные фазы 220 В, со сдвигом 120°, и мощность 3 КВт.
Схема частотника выглядит так:
Так как частотный преобразователь состоит из частей, работающих как на высоком (силовая часть), так и на низком (управление) напряжении, то логично будет разбить его на три платы (основная плата, плата управления, и низковольтный блок питания для неё) для исключения возможности пробоя между дорожками с высоким и низким напряжением и выхода устройства из строя.
Вот так выглядит разводка платы управления:
Для питания платы управления можно использовать любой блок питания на 24 В, с пульсациями не более 1 В в размахе, с задержкой прекращения подачи питания на 2−3 секунды с момента исчезновения питающего напряжения 220 В.
Блок питания можно собрать и самим по этой схеме:
Обратите внимание, что номиналы и названия всех радиокомпонентов на схемах уже подписаны, так что собрать по ним работающее устройство может даже начинающий радиолюбитель.
Перед тем как приступить к сборке преобразователя, убедитесь:
 В наличии у вас всех необходимых компонентов;
В наличии у вас всех необходимых компонентов;- В правильности разводки платы;
- В наличии всех нужных отверстий для установки радиодеталей на плате;
- В том, что не забыли залить в микроконтроллер прошивку из этого архива:
 В наличии у вас всех необходимых компонентов;
В наличии у вас всех необходимых компонентов;Если вы все сделали правильно и ничего не забыли, можете приступать к сборке.
После сборки у вас получится что-то похожее:
 Теперь вам осталось проверить устройство: для этого подключаем двигатель к частотнику и подаем на него напряжение. После того как загорится светодиод, сигнализирующий о готовности, нажмите на кнопку «Пуск». Двигатель должен начать медленно вращаться. При удержании кнопки двигатель начинает разгоняться, при отпускании — поддерживает обороты на том уровне, до которого успел разогнаться. При нажатии кнопки «Сброс» двигатель останавливается с выбегом. Кнопка «Реверс» задействуется только при остановленном двигателе.
Теперь вам осталось проверить устройство: для этого подключаем двигатель к частотнику и подаем на него напряжение. После того как загорится светодиод, сигнализирующий о готовности, нажмите на кнопку «Пуск». Двигатель должен начать медленно вращаться. При удержании кнопки двигатель начинает разгоняться, при отпускании — поддерживает обороты на том уровне, до которого успел разогнаться. При нажатии кнопки «Сброс» двигатель останавливается с выбегом. Кнопка «Реверс» задействуется только при остановленном двигателе.
Если проверка прошла успешно, то можете начинать изготавливать корпус и собирать в нем частотник. Не забудьте сделать в корпусе отверстия для притока холодного и оттока горячего воздуха от радиатора IGBT транзисторов.
Частотник для однофазного двигателя
 Преобразователь частоты для однофазного двигателя отличается от трехфазного тем, что имеет на выходе две фазы (ошибки тут нет, двигатель однофазный, при подключении без частотника рабочая обмотка подключается в сеть напрямую, а пусковая — через конденсатор; но при использовании частотника пусковая обмотка подключается через вторую фазу) и одну нейтраль — в отличие от трех фаз у последнего, так что сделать частотник для однофазного электродвигателя, используя в качестве основы схему от трехфазного, не получится, поэтому придется начинать все сначала.
Преобразователь частоты для однофазного двигателя отличается от трехфазного тем, что имеет на выходе две фазы (ошибки тут нет, двигатель однофазный, при подключении без частотника рабочая обмотка подключается в сеть напрямую, а пусковая — через конденсатор; но при использовании частотника пусковая обмотка подключается через вторую фазу) и одну нейтраль — в отличие от трех фаз у последнего, так что сделать частотник для однофазного электродвигателя, используя в качестве основы схему от трехфазного, не получится, поэтому придется начинать все сначала.
В качестве мозга этого преобразователя мы будем использовать МК ATmega328 с загрузчиком ардуины. В принципе, это и есть Arduino, только без своей обвязки. Так что, если у вас в закромах завалялась ардуинка с таким микроконтроллером, можете смело выпаивать его и использовать для дела, предварительно залив на него скетч (прошивку) из этого архива:
К атмеге будет подключен драйвер IR2132, а уже к нему — мосфеты IRG4BC30, к которым мы подключим двигатель мощностью до 1 КВт включительно.
Схема частотного преобразователя для однофазного двигателя:
Также для питания ардуины (5в) и для питания силового реле (12в), нам понадобятся 2 стабилизатора. Вот их схемы:
Стабилизатор на 12 вольт.
Стабилизатор на 5 вольт.
 Внимание! Эта схема не из простых. Возможно, придется настраивать и отлаживать прошивку для достижения полной работоспособности устройства, но это несложно, и мануалов по программированию Arduino в интернете — великое множество. К тому же сам скетч содержит довольно подробные комментарии к каждому действию. Но если для вас это слишком сложно, то вы можете попробовать найти такой частотник в магазине. Пусть они и не так распространены, как частотники для трехфазных двигателей, но купить их можно, пусть и не в каждом магазине.
Внимание! Эта схема не из простых. Возможно, придется настраивать и отлаживать прошивку для достижения полной работоспособности устройства, но это несложно, и мануалов по программированию Arduino в интернете — великое множество. К тому же сам скетч содержит довольно подробные комментарии к каждому действию. Но если для вас это слишком сложно, то вы можете попробовать найти такой частотник в магазине. Пусть они и не так распространены, как частотники для трехфазных двигателей, но купить их можно, пусть и не в каждом магазине.
Еще обратите внимание на то, что включать схему без балласта нельзя — сгорят выходные ключи. Балласт нужно подключать через диод, обращенный анодом к силовому фильтрующему конденсатору. Если подключите балласт без диода — опять выйдут из строя ключи.
Если вас все устраивает, можете приступать к изготовлению платы, а затем — к сборке всей схемы. Перед сборкой убедитесь в правильности разводки платы и отсутствии дефектов в ней, а также — в наличии у вас всех указанных на схеме радиодеталей. Также не забудьте установить IGBT-транзисторы на массивный радиатор и изолировать их от него путем использования термопрокладок и изолирующих шайб.
 После сборки частотника можете приступать к его проверке. В идеале у вас должен получиться такой функционал: кнопка «S1» — пуск, каждое последующее нажатие добавляет определенное (изменяется путем редактирования скетча) количество оборотов; «S2» — то же самое, что и «S1», только заставляет двигатель вращаться в противоположном направлении; кнопка «S3» — стоп, при её нажатии двигатель останавливается с выбегом.
После сборки частотника можете приступать к его проверке. В идеале у вас должен получиться такой функционал: кнопка «S1» — пуск, каждое последующее нажатие добавляет определенное (изменяется путем редактирования скетча) количество оборотов; «S2» — то же самое, что и «S1», только заставляет двигатель вращаться в противоположном направлении; кнопка «S3» — стоп, при её нажатии двигатель останавливается с выбегом.
Обратите внимание, что реверс осуществляется через полную остановку двигателя, при попытке сменить направление вращения на работающем двигателе произойдет его мгновенная остановка, а силовые ключи сгорят от перегрузки. Если вам не жаль денег, которые придется потратить на замену мосфетов, то можете использовать эту особенность в качестве аварийного тормоза.
Возможные проблемы при проверке
Если при проверке частотника схема не заработала или заработала неправильно, значит, вы где-то допустили ошибку. Отключите частотник от сети и проверьте правильность установки компонентов, их исправность и отсутствие разрывов/замыканий дорожек там, где их быть не должно. После обнаружения неисправности устраните её и проверьте преобразователь снова. Если с этим все в порядке, приступайте к отладке прошивки.
Частотные преобразователи для двигателей своими руками
Регулирование частоты вращения ротора и момента на валу двигателей переменного тока частотой напряжения на обмотках – один из самых перспективных способов управления. Такой метод позволяет сократить потребление электроэнергии, снизить износ двигателей и механизмов, осуществлять плавный пуск без скачков тока. Частотное управление также позволяет отказаться от заслонок, задвижек, муфт и других механических средств регулирования технологических параметров и изменения скорости вращения вала.
Для регулирования частоты напряжения, которое подается на статор электродвигателя, используют частотные преобразователи. Наибольше распространение получили устройства на базе инверторов напряжения.
Такие частотные преобразователи состоят из выпрямителя, звена постоянного тока, инвертора.
Трехфазное напряжение сети преобразуются в постоянное, в звене постоянного тока на базе емкостного элемента сглаживаются пульсации, в инверторе постоянное напряжение трансформируется в переменное другой частоты.
Частота на входе регулируется поочередным открыванием и запиранием электронных ключей. Импульсы, изменяющие состояние полупроводниковых коммутаторов, задаются с управляющего устройства. Ключи выполнены на базе силовых транзисторов или тиристоров. Наиболее распространенная элементная база – биполярные транзисторы с изолированным затвором IGBT или тиристоры GTO, GCT, IGCT , SGCT.
Преобразователи частоты применяются в электроприводах практически всех отраслей промышленности, в бытовых станках и других сферах.
Современный частотник это не только регулятор частоты вращения электродвигателя. Оборудование совмещает функции ПИ и ПИД-регуляторов, электроаппаратов защиты от аварий и аномальных режимов работы. Преобразователи частоты также обеспечивают индикацию рабочих параметров, связь с комплексными или местными системами автоматизации по распространенным протоколам связи, фиксируют неисправности и поломки, передают данные на удаленные устройства.
Простые преобразователи частоты для станков бытового применения можно сделать своими руками. Для этого необходимы базовые знания промышленной электроники, теоретической электротехники, а также иметь навыки построения схем, пайки.
Любительские преобразователи частоты в основном используют для непосредственного задания скорости электропривода небольшой мощности. Самостоятельно разработать и собрать устройство с функциями автоматического регулятора и другими параметрами промышленного оборудования довольно сложно. Рассмотрим преобразователь частоты, разработанный и собранный самостоятельно.
Схема и описание любительского частотника на IGBT транзисторах
Производители элементов для силовой электроники выпускают интеллектуальные силовые модули и микроконтроллеры для управления такими приводами, что существенно упрощает задачу.
До появления комплексных элементов силовую часть и управляющий блок с генератором импульса приходилось собирать самостоятельно.
В представленной схеме применяется микроконтроллер ATmega48 и силовой блок IRAMS10UP60B со встроенным драйвером и возможностью управления по 3 каналам широтно-импульсного модулятора.
Управляющий блок реализует скалярное управление приводом, с увеличением частоты напряжения на выходе увеличивается его величина.
Заводские настройки контроллера предназначены для работы с двигателем на номинальное напряжение 220 В частотой 50 Гц. Скорость изменения частоты при разгоне составляет 15 Гц/ сек, до номинальной скорости электродвигатель разгоняется за 3 секунды, до частоты 150 Гц – за 10 секунд.
Добавочное напряжение на намагничивание установлено 10% от номинального. Время намагничивания и торможения постоянным током постоянно и составляет 1 сек. Добавочное напряжение при намагничивании и в режиме торможения изменяется одновременно.
При подаче напряжения заряжается конденсатор в звене постоянного тока. Как только напряжение на конденсаторе достигает 220 В, привод можно запускать. Для индикации готовности к пуску предусмотрена сигнальная цепь из светодиода и реле предзаряда. Как только конденсатор заряжается, контакты реле замыкаются, загорается светодиод, сигнализирующий о готовности привода.
Для управления преобразователем предусмотрено 6 выходов. Первые 2 – прямое и обратное вращение вала с номинальной частотой. Выходы с 3 по 6 – подача напряжения фиксированной частоты, которая задается резисторами R1, R2, R3, R4.
При регулировке частоты резисторами во время работы двигателя изменять частоту вращения нельзя. Частота меняется только после повторной подачи команды на 1 или 2 выход. Данные с регулировочных сопротивления считываются микроконтроллером только при отсутствии сигналов с 1 и 2 выхода.
Для плавного изменения скорости при работающем электроприводе требуется включить в цепь джампер. При этом R1 остается активным, а при помощи R4 можно задавать частоту выходного напряжения 5 до 100Гц.
При регулировке частоты необходимо учитывать, что максимальном уровню сигнала 5 В на входе микроконтроллера соответствует верхнее значения частоты – 200 Гц. Для настройки масштабирования напряжения в звене постоянного тока 1:100 предусмотрен резистор R5. Для измерения уровня управляющего сигнала предусмотрены резисторы R1, R2, R3, R4 с общим отрицательным контактом.
Настройка самодельного преобразователя частоты
Перед настройкой преобразователя проверяют правильность и качество установки электронных комплектующих. Далее проверяют делитель напряжения для звена постоянного тока (цепь R2). 1 В на соответствующим выходе микроконтроллера должен соответствовать 100 В звена постоянного тока.
Далее приступают к настройке привода. Силовые модули имеют установленную заводскую конфигурацию для двигателей на 220 и 380 В номинальной частотой 50 Гц. Чтобы их активировать, требуется:
- Подать питание на преобразователь и контроллер.
- Дождаться готовности (должен загореться светодиод).
- Удерживать кнопку В1 пока светодиод не начнет мигать, затем отпустить ее.
- Выбрать 1 скорость, когда светодиодный индикатор перестанет мигать, снять команду.
В этом случае будут активированы настройки по умолчанию: номинальное напряжение электродвигателя – 220 В; 50 Гц, добавочное напряжение для намагничивания и торможения – 10%, скорость изменения частоты при разгоне и торможении – 15 Гц/сек.
Настройка на номинальную частоту 30 Гц осуществляется аналогично, разница в выборе выхода. В этом случае команда подается на выход 2.
Для задания 1 и 2 скорости настроечными резисторами необходимо не подавать напряжение на вход выбора 1 или 2 скорости до задания параметров регулировочными резисторами. Далее нажать и удерживать кнопку В1 до тех пор, пока светодиод не начнет моргать, выставить значения частоты (скорости) всеми резисторами. Затем удерживать кнопку В1 до исчезновения мигания светодиода. При этом настройки будут зафиксированы.
К такому приводу можно подключать двигатели до 0,75 кВт. Мощность электродвигателей зависит от емкости конденсатора в звене постоянного тока, на каждый 2 кВт необходимо 1000 мкФ. Для исключения повреждений силового модуля рекомендуется ставить дроссель на выходе. Индуктивный элемент ограничивает скорость нарастания тока и защищает преобразователь.
Возможности самодельного преобразователя частоты
Частотник, собранный по данной схеме, обеспечивает:
- Задание частоты напряжения на выходе в пределах от 5 до 200 Гц.
- Изменение скорости частоты от 5 до 50 Гц/cек.
- 4 фиксированные частоты с возможностью настройки в диапазоне 5-200 Гц.
- Добавочное напряжение на намагничивание и торможение от 0 до 20% от номинального (по умолчанию 10%).
- 2 встроенные готовые настройки.
- Регулировку скорости на ходу двигателя построечным потенциометром.
- Индикацию готовности привода (предзаряда конденсатора в звене постоянного тока).
- Возможность регулирования характеристики U/F (скалярное управление).
Устройство также контролирует температуру силовых транзисторов IGBT, величину напряжения DC звена, сигнализирует о недопустимых значениях этих параметров, обеспечивает аварийную остановку электропривода. При необходимости возможно реализовать защиту от сверхтоков.
Частотники, собранные своими руками, вполне можно использовать для маломощных приводов бытового назначения. Устройства обеспечивают необходимые функции и режимы работы такого оборудования.

